In the general case, the representation of a linear system using a linear difference equation with constant coefficients
i=0∑Naiy[n−i]=j=0∑Mbjx[n−j] Taking the Z-transform of the equation (using linearity and time-shifting laws) yields
Y(z)i=0∑Naiz−i=X(z)j=0∑Mbjz−j reordering the result gives a transfer function
H(z)=X(z)Y(z)=∑i=0Naiz−i∑j=0Mbjz−j=a0+a1z−1+...+aNz−Nb0+b1z−1+...+bMz−M where the numerator has M roots (corresponding to zeros of H) and the denominator has N roots (corresponding to poles of H)
Zeros and poles are usually complex, and in order to plot them on the complex plane (pole-zero plot) we rewrite the transfer function in terms of zeros and poles
H(z)=a0+a1z−1+...+aNz−Nb0+b1z−1+...+bMz−M=(1−p1z−1)(1−p2z−1)...(1−pNz−1)(1−q1z−1)(1−q2z−1)...(1−qMz−1) where qk is the k-th zero and pk is the k-th pole.
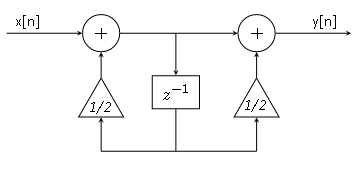
So, if the linear difference equation
y[n]−21y[n−1]=x[n]+21x[n−1] where
M=N=1, a0=b0=1, a1=−21, b1=21 Then the transfer function is
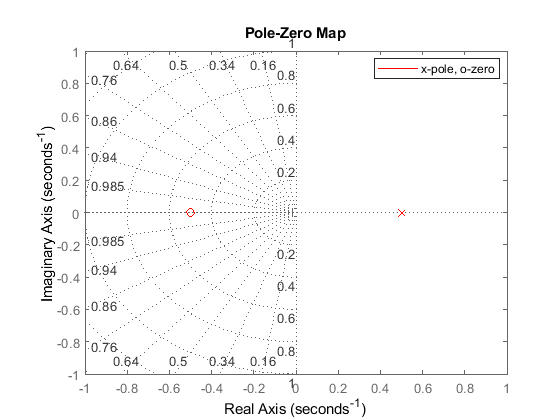
H(z)=X(z)Y(z)=a0+a1z−1b0+b1z−1=1−21z−11+21z−1 the numerator has root (corresponding to zero of H)
q1=−21 the denominator has root (corresponding to pole of H)
p1=21 The DT LTI system
The pole-zero plot